interface I2C-dat
https://invensense.tdk.com/products/motion-tracking/6-axis/mpu-6050/
- Accelerometer (AX/AY/AZ) — converted to g by: accel_g = raw / 16384.0
- Gyroscope (GX/GY/GZ) — converted to °/s by: gyro_dps = raw / 131.0
- Temperature — converted to °C by: T = (raw / 340.0) + 36.53
Plus derived values computed in the code:
Roll and Pitch from accelerometer (tilt relative to gravity).
Notes:
- Raw values are signed 16-bit (two registers per axis).
- For stable orientation you must fuse accel + gyro (complementary, Madgwick, Kalman) because accel gives inclination (no yaw) and gyro integrates to angle but drifts over time.
- You can change full-scale ranges (ACCEL_CONFIG / GYRO_CONFIG) — if you do, update the scale factors.
boards
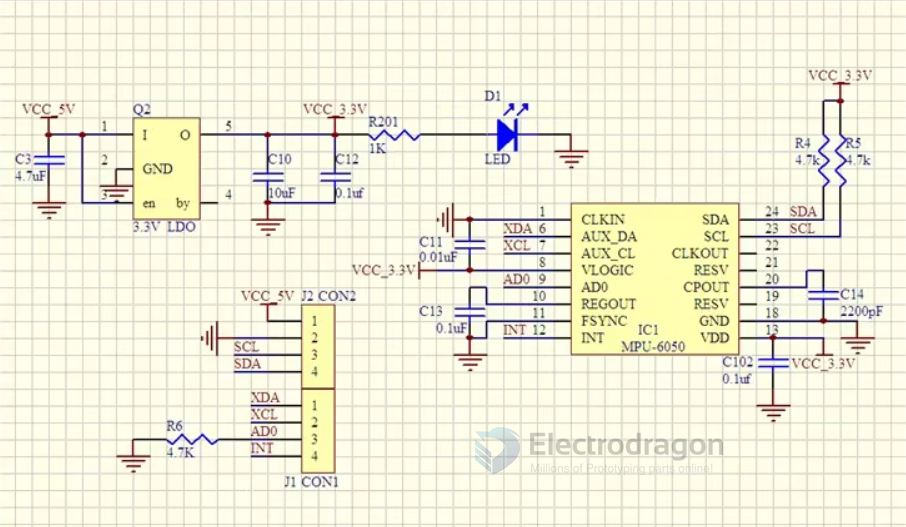
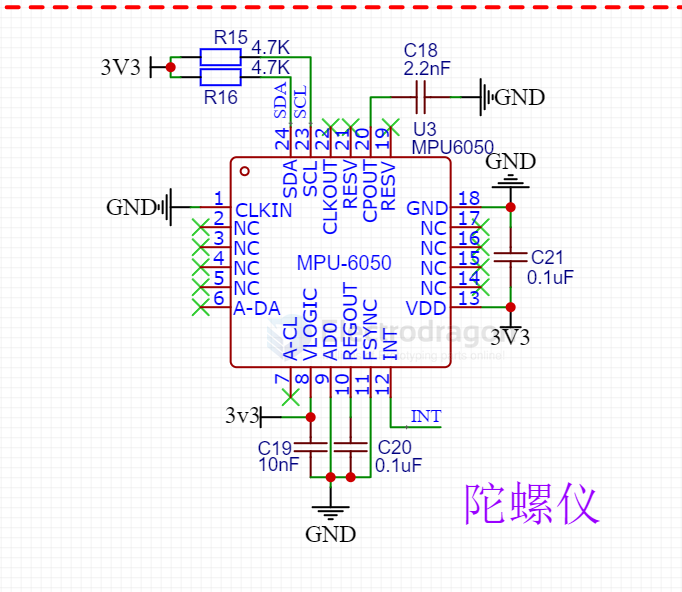
SCH
code and datasheet
Chip-dat/InvenSense-dat/MPU6050-DAT/RM-MPU-6000A.pdf - Chip-dat/InvenSense-dat/MPU6050-DAT/PS-MPU-6000A.pdf