Multirotor Drones (or Multirotor UAVs).
Multirotor refers to any drone with multiple rotors (propellers) for lift and control.
Subcategories include:
Tricopter – 3 rotors
Quadcopter – 4 rotors
Hexacopter – 6 rotors
Octocopter – 8 rotors
Quadcopter vs Octocopter
| Feature | Quadcopter | Octocopter |
|---|---|---|
| Power & Payload | Sufficient power for small drones; simple structure and lightweight; relatively low energy consumption | Higher thrust, can carry heavy cameras or sensors; multi-motor redundancy allows flight even if one or two motors fail |
| Drawbacks | Limited payload; less stable in high wind | High energy consumption; complex structure, heavier; higher requirements for takeoff and operation |
| Stability & Wind Resistance | Easy to control in low wind; agile and responsive | Strong wind resistance; multi-motor redundancy increases flight safety |
| Drawbacks | Weak wind resistance; prone to crash if one motor fails | Slightly slower response; less agile than quadcopter |
| Cost & Maintenance | Low cost; fewer motors and controllers, easier maintenance | High cost; complex maintenance, more motors prone to failure; higher battery requirements |
| Typical Applications | Recreational aerial photography, educational experiments, light surveillance | Professional aerial photography, industrial inspection, payload transport, rescue missions |
| Summary | Lightweight, flexible, low cost; suitable for recreational and light-duty tasks | Powerful, wind-resistant, heavy-lift capable; suitable for professional and industrial use |
opensource
cleanfight
https://github.com/cleanflight/cleanflight
https://github.com/cleanflight/cleanflight/tree/master/docs
Openpilot
Commerial
CJMCU
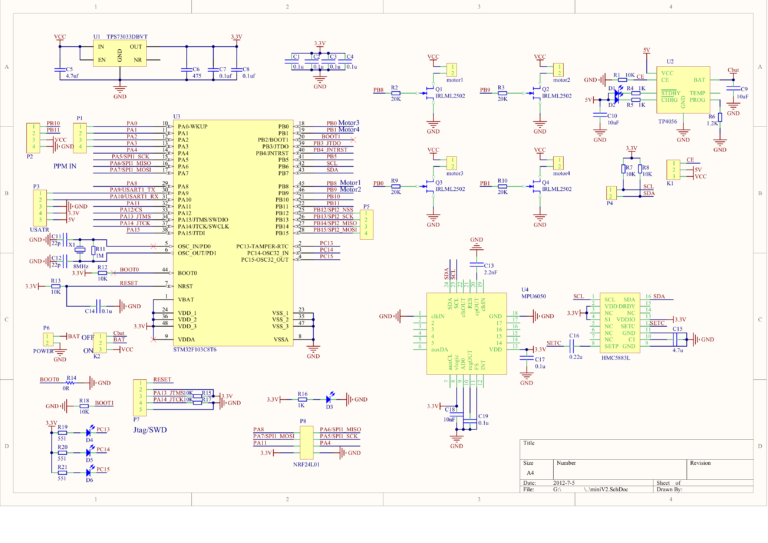
https://www.rcgroups.com/forums/showthread.php?2456739-Openpilot-port-to-CJMCU-stm32-quadcopter
https://oscarliang.com/build-fpv-micro-quadcopter-smallest-quad/
new version from https://aeracoop.net/cjmcu2-open-source-brushed-quadcopter/
https://github.com/Edragon/cjmcu2