
reference
chassis
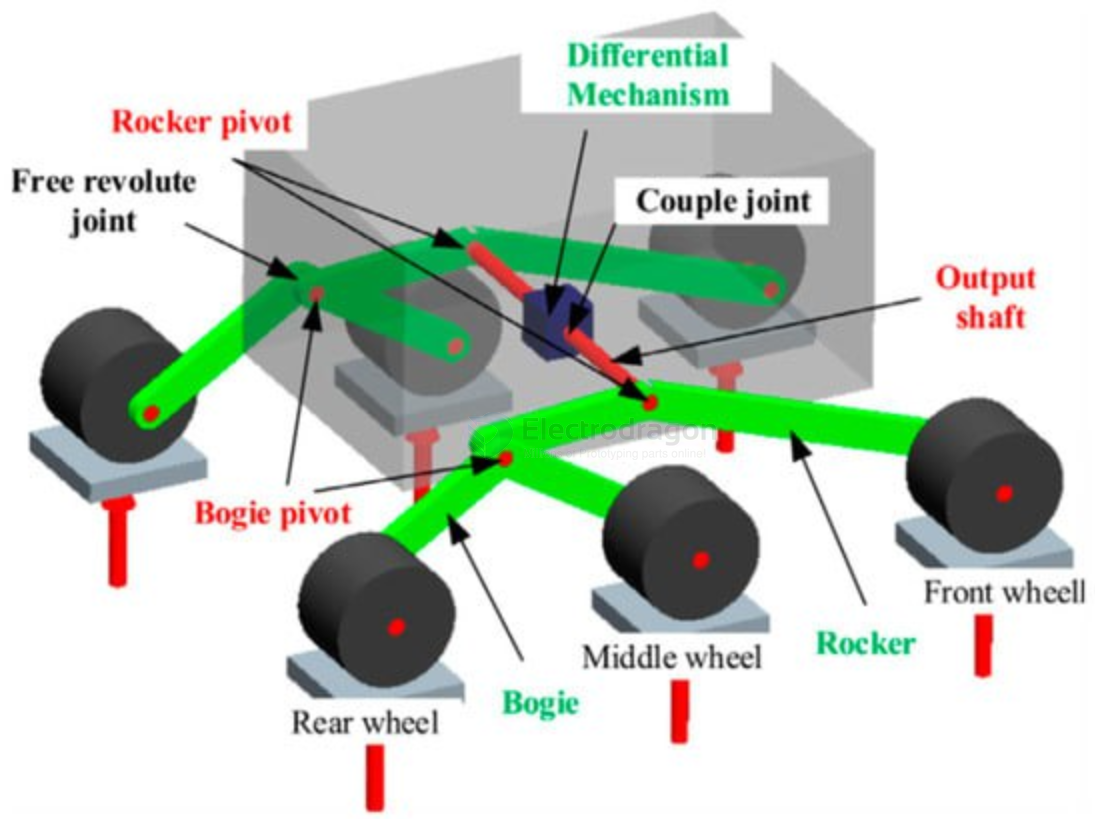
The Curiosity rover uses a special mobility system based on the famous NASA “Rocker–Bogie Suspension” design.
Its chassis gives it several important advantages on rough Martian terrain:
1. High Stability Over Rough Terrain
- The rocker–bogie system keeps all wheels in contact with the ground.
- The rover stays stable even when wheels climb over large rocks or dips.
- It greatly reduces the chance of tipping over.
2. Excellent Obstacle-Crossing Ability
- Curiosity can climb over rocks as tall as 65 cm (about twice the wheel diameter).
- It can also traverse slopes up to 30 degrees.
- Ideal for Mars’ uneven, rocky environment.
3. Low Shock / Smooth Motion
- The suspension has no springs, so there is no bouncing.
- Reduces shock to instruments (cameras, spectrometers, drills).
- Increases measurement accuracy and protects hardware.
4. High Durability and Reliability
- Few moving parts → less chance of mechanical failure.
- Works in extremely cold Martian temperatures.
- Designed for long missions (original goal: 2 years, now over 10+ years).
5. Six-Wheel Drive System
- All six wheels have independent motors.
- If one wheel is damaged, the rover can still move.
- Provides very strong traction on sand, soil, and rock.
6. Articulated Steering (Front & Rear Wheels)
- Front and rear wheels can steer.
- Allows “tank-like” pivot turns in place.
- Reduces turning radius and improves maneuverability.
7. High Ground Clearance
- Tall chassis avoids getting stuck on rocks or ridges.
- Keeps sensitive scientific instruments safe.
8. Central Body (Chassis) Protects Instruments
- Houses power system (RTG), computers, and sensors.
- Provides insulation against radiation and extreme temperatures.
- Serves as a strong frame for the robotic arm and mast.
Summary
Curiosity’s chassis is optimized for:
- stability
- durability
- obstacle handling
- accurate scientific operation
gearbox
Curiosity Rover Drive System and Differential Gearbox
1. Drive System Overview
- Curiosity has 6-wheel independent drive; each wheel has its own motor.
- The wheels are connected via the rocker-bogie suspension system, ensuring obstacle climbing and load distribution.
- Wheel motors use planetary gear reduction boxes to provide high torque.
2. Differential Gearbox Function
- In traditional vehicles, a differential allows left and right wheels to rotate at different speeds to prevent slipping.
- For Curiosity:
- Each wheel is independently driven → no need for a traditional mechanical differential.
- Electronic control adjusts wheel speed individually, achieving the same effect as a differential.
- Small internal gears in the motor gearbox may distribute torque and protect the motor.
3. Summary
- Curiosity does not have a conventional mechanical differential; electronic control replaces it.
- Planetary gearboxes provide high torque to each wheel.
- Each wheel's speed is independently adjusted based on terrain and suspension.
- For RC or small rover design: 6 independent motors + electronic control can replace a mechanical differential.
Note: This setup allows precise control over each wheel and enables stable motion on uneven terrain.