Direct-Drive Servos
When your servo horns are the feet, the most efficient movement is a coordinated rotation that mimics a wheel but maintains the balance of a quadruped.
1. The Diagonal Trot (Recommended)
This is the smoothest and fastest way to move. You move diagonal pairs in a "circular" or "elliptical" path.
- Group 1: Front Left (FL) and Rear Right (RR)
- Group 2: Front Right (FR) and Rear Left (RL)
The Logic:
- Group 1 rotates "down and back" (pushing the floor) while Group 2 rotates "up and forward" (lifting through the air).
- The pairs switch roles.
- By using a 180° phase shift between the two groups, the robot's body stays level while moving forward.
Trot Gait
LR and RR are mirrored, and LF and RF are mirrored,
LR and LF are swing in the same direction, LF and RF are swing in the same direction,
but pair of LR + LF and pair of RR + RF are swing in opposite direction
- The 2-Step Forward Sequence
Here is how your diagonal pairs should coordinate:
Step A (Diagonal Pair 1):
Front-Left & Rear-Right swing Forward.
(At the same time, the other two legs push Backward).
Step B (Diagonal Pair 2):
Front-Right & Left-Rear swing Forward.
(At the same time, the other two legs push Backward).
What happens if you "Pulse" them together?
If you want them to move together, you have to do a "Gait" (步态). A common way to move "together" is the Trot Gait:
Diagonal Pair A: Front Left and Rear Right move forward.
Diagonal Pair B: Front Right and Rear Left move forward.
By moving diagonals together, the robot stays balanced on a line, and you get a much faster, smoother walk than moving one leg at a time.
2. The "Crawl" (High Stability)
If your robot is top-heavy or the servo horns are very long, a Trot might be too shaky. Use a Sequence Walk instead.
- Sequence: FL -> RR -> FR -> RL
- Action: Only one "foot" moves forward at a time while the other three stay on the ground.
- Benefit: The Center of Mass (CoM) is always supported by a triangle of legs, making it nearly impossible to tip over.
The Walking Sequence (Crawl Gait)
The safest way to move is to move one leg at a time while the other three form a stable triangle on the ground.
The Pattern:
Rear Left (RL) moves forward (Lift and swing).
Front Left (FL) moves forward.
Rear Right (RR) moves forward.
Front Right (FR) moves forward.
- Mechanical Implementation Tips
| Foot Design | Benefit | Best For |
|---|---|---|
| Offset "L" Shape | Increases the "stride" length without needing a larger servo rotation. | Speed |
| Circular/C-Shape | Provides a smooth "rolling" contact point with the floor. | Stability/Grass |
| Rubber-Tipped Point | Increases friction to prevent the servos from slipping during the "push" phase. | Hard floors |
- Simple Code Logic (Pseudocode) To implement the Trot, your code should look something like this:
// Phase 1
Servo_FL.write(45); // Push
Servo_RR.write(45); // Push
Servo_FR.write(135); // Lift/Reset
Servo_RL.write(135); // Lift/Reset
delay(200);
// Phase 2
Servo_FL.write(135); // Lift/Reset
Servo_RR.write(135); // Lift/Reset
Servo_FR.write(45); // Push
Servo_RL.write(45); // Push
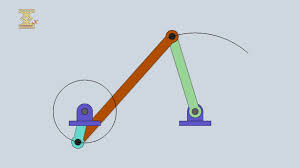
Crank-Rocker
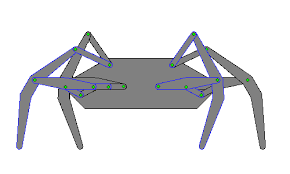
Klann Linkage
Diagonal Trot

trot gait
The Trot Gait is a symmetrical, "two-beat" gait used by four-legged animals and robots. Its defining characteristic is the simultaneous movement of diagonal pairs of legs.
1. The Trot Gait Mechanics
In a trot, the legs move in the following sequence:
- Pair A: Front Left (FL) and Rear Right (RR) move together.
Pair B: Front Right (FR) and Rear Left (RL) move together.
Symmetry: The movement of the left side is a mirror image of the right side, shifted in time.
- Duty Factor: In a standard trot, each foot is on the ground for about 50% of the stride cycle.
- Efficiency: It is highly energy-efficient for traveling at medium speeds because it maintains a stable "support line" between the diagonal feet.
2. Comparison of Common Quadruped Gaits
Beyond the trot, quadrupeds use several other gait patterns depending on the required speed and terrain stability.
A. The Walk (Static Stability)
- Pattern: Each leg moves individually (e.g., RL -> FL -> RR -> FR).
- Stability: At least three legs are on the ground at all times, keeping the Center of Mass (CoM) within the support triangle.
- Usage: Best for very slow, precise movement over uneven terrain.
B. The Pace (Lateral Gait)
- Pattern: Both legs on the same side move together (e.g., FL + RL, then FR + RR).
- Characteristics: This creates a side-to-side swaying motion. It is common in camels and some breeds of horses.
- Robot Note: Harder to balance in robotics due to the large lateral weight shift.
C. The Bound (Pitching Gait)
- Pattern: Both front legs move together, followed by both rear legs.
- Characteristics: High-speed leaping motion. It involves significant "pitch" (tilting up and down) of the body.
- Usage: Used by squirrels and dogs for rapid acceleration or clearing obstacles.
D. The Gallop (Asymmetrical High Speed)
- Pattern: A four-beat sequence with a "flight phase" where all four feet are off the ground.
- Characteristics: The fastest possible gait. It utilizes the elasticity of the spine to increase stride length.
E. The Pronk (High Impact)
- Pattern: All four legs jump and land simultaneously.
- Usage: Often seen in springboks or gazelles. In robotics, it's used to test motor peak power and landing impact absorption.
3. Summary Table
| Gait Name | Pairing Type | Beats | Best For |
|---|---|---|---|
| Walk | Single Leg | 4 | Maximum Stability |
| Trot | Diagonal Pairs | 2 | Efficiency / Medium Speed |
| Pace | Lateral Pairs | 2 | Long-distance travel (certain species) |
| Bound | Front/Rear Pairs | 2 | Clearing Obstacles / Rapid Burst |
| Gallop | No Pairs (Sequence) | 4 | Maximum Speed |