Features
Support APPs or UART interface or Python script or ..
- socketCAN - linux
- CANtact V0.3
- Cangaroo
- slCAN
- python
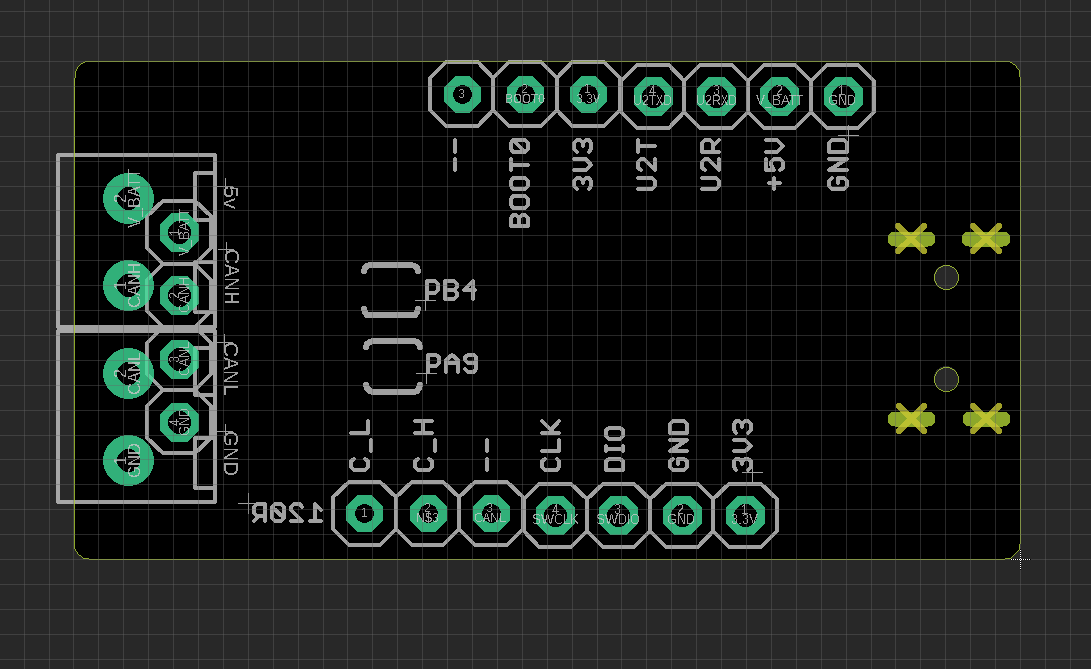
hardware
Demos
- https://twitter.com/electro_phoenix/status/1651872392791093249
Default firmware
- Please notice we flash UART interface fimware before 2023. April
- And Canable firmware after 2023. April
- If you need upgrade to canable firmware, please try DFU update or flash chip with a .bin file
- On board LEDs blink on canable version, but not in UART (slCAN) version
supported commands
O - Open channel
C - Close channel
S0 - Set bitrate to 10k
S1 - Set bitrate to 20k
S2 - Set bitrate to 50k
S3 - Set bitrate to 100k
S4 - Set bitrate to 125k
S5 - Set bitrate to 250k
S6 - Set bitrate to 500k
S7 - Set bitrate to 750k
S8 - Set bitrate to 1M
M0 - Set mode to normal mode (default)
M1 - Set mode to silent mode
A0 - Disable automatic retransmission
A1 - Enable automatic retransmission (default)
TIIIIIIIILDD... - Transmit data frame (Extended ID) [ID, length, data]
tIIILDD... - Transmit data frame (Standard ID) [ID, length, data]
RIIIIIIIIL - Transmit remote frame (Extended ID) [ID, length]
rIIIL - Transmit remote frame (Standard ID) [ID, length]
V - Returns firmware version and remote path as a string
ref
- legacy reference - https://w.electrodragon.com/w/Category:CAN#CAN_USB
- https://canable.io/getting-started.html
- https://github.com/normaldotcom/canable-fw